Achieving Human Level Competitive Robot Table Tennis
David B. D'Ambrosio, Saminda Abeyruwan, Laura Graesser, Atil Iscen, Heni Ben Amor, Alex Bewley, Barney J. Reed, Krista Reymann, Leila Takayama, Yuval Tassa, Krzysztof Choromanski, Erwin Coumans, Deepali Jain, Navdeep Jaitly, Natasha Jaques, Satoshi Kataoka, Yuheng Kuang, Nevena Lazic, Reza Mahjourian, Sherry Moore, Kenneth Oslund, Anish Shankar
2024-08-08
Summary
This paper discusses the development of a robot capable of playing table tennis at an amateur human level, showcasing significant advancements in robotics and AI.
What's the problem?
Creating robots that can perform complex tasks like playing sports is challenging because they need to be fast, precise, and able to adapt to different opponents. Most existing robots struggle with these aspects, especially in dynamic environments like table tennis, where quick decision-making and coordination are crucial.
What's the solution?
The researchers developed a robot called Optimus-1 that uses a combination of techniques to improve its performance. They created a two-part control system: a high-level controller that decides which skills to use and several low-level controllers that execute specific actions like hitting the ball. The robot was trained in simulations and then tested in real matches against human players of varying skill levels. It learned to adapt its strategies based on the opponent's style and performance during matches.
Why it matters?
This research is important because it marks a step towards creating robots that can compete with humans in real-world tasks. By achieving amateur-level performance in table tennis, the robot demonstrates the potential for future applications in various fields, such as robotics for home assistance or industrial tasks. It also shows how advanced AI can enhance physical skills and decision-making, paving the way for more capable autonomous systems.
Abstract
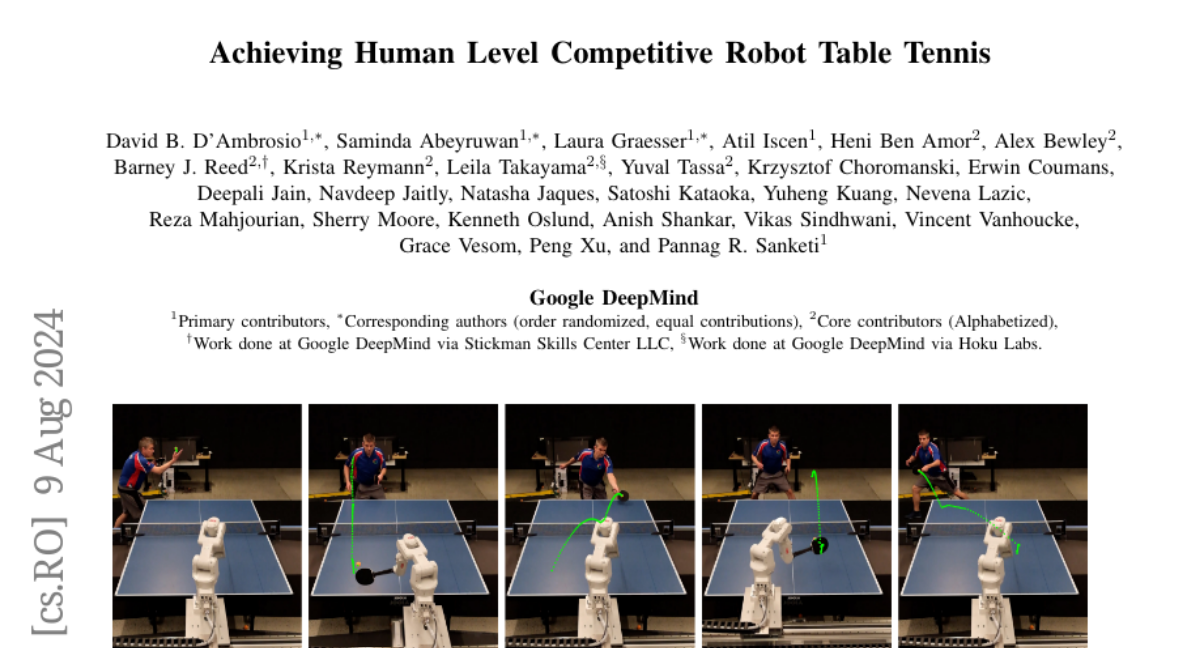
Achieving human-level speed and performance on real world tasks is a north star for the robotics research community. This work takes a step towards that goal and presents the first learned robot agent that reaches amateur human-level performance in competitive table tennis. Table tennis is a physically demanding sport which requires human players to undergo years of training to achieve an advanced level of proficiency. In this paper, we contribute (1) a hierarchical and modular policy architecture consisting of (i) low level controllers with their detailed skill descriptors which model the agent's capabilities and help to bridge the sim-to-real gap and (ii) a high level controller that chooses the low level skills, (2) techniques for enabling zero-shot sim-to-real including an iterative approach to defining the task distribution that is grounded in the real-world and defines an automatic curriculum, and (3) real time adaptation to unseen opponents. Policy performance was assessed through 29 robot vs. human matches of which the robot won 45% (13/29). All humans were unseen players and their skill level varied from beginner to tournament level. Whilst the robot lost all matches vs. the most advanced players it won 100% matches vs. beginners and 55% matches vs. intermediate players, demonstrating solidly amateur human-level performance. Videos of the matches can be viewed at https://sites.google.com/view/competitive-robot-table-tennis