Adaptive Domain Modeling with Language Models: A Multi-Agent Approach to Task Planning
Harisankar Babu, Philipp Schillinger, Tamim Asfour
2025-06-30
Summary
This paper talks about TAPAS, a new system that combines large language models with symbolic planning to help robots and AI systems plan and adapt to complex tasks dynamically without needing manual programming of the environment.
What's the problem?
Traditional task planning often requires manually creating detailed models of the environment and tasks, which is time-consuming and not flexible when conditions change or new things appear.
What's the solution?
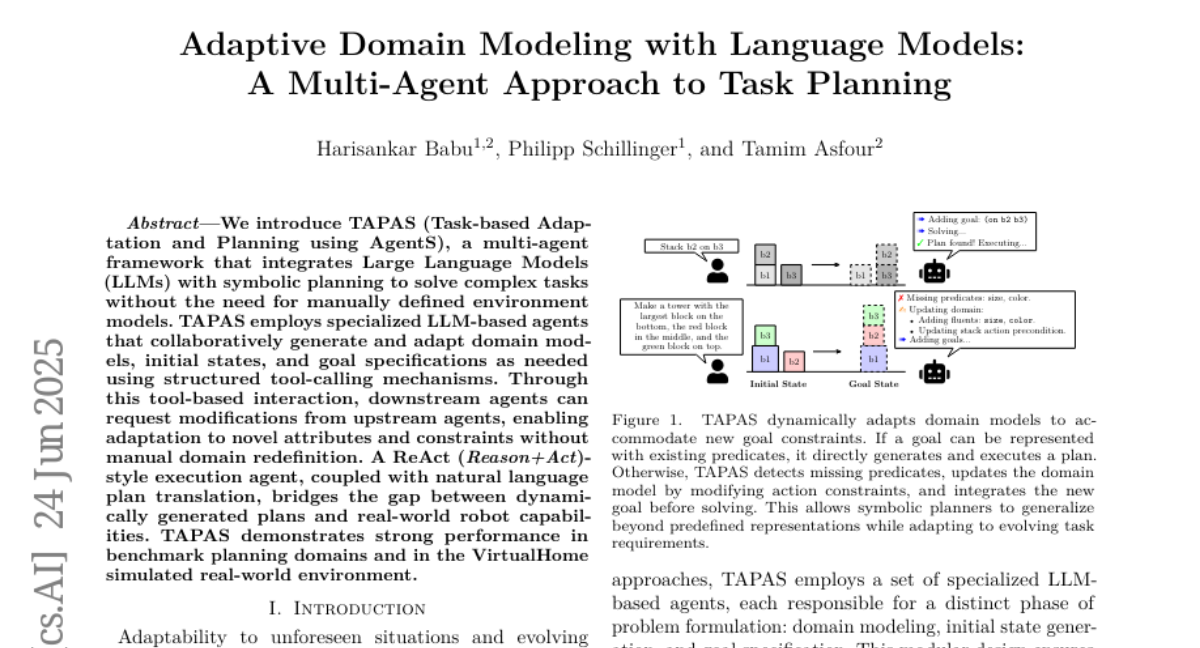
TAPAS uses specialized language model agents that work together to create and update domain models, initial conditions, and goals as the task progresses. These agents communicate using structured tools, allowing the system to adapt plans and handle new constraints or changes without the need for manual rewrites. A separate agent translates these dynamic plans into actions robots can perform.
Why it matters?
This matters because it enables robots and AI to work more independently and flexibly in real-world situations, making them better at handling unexpected changes and complex tasks in environments like homes or factories.
Abstract
TAPAS integrates LLMs with symbolic planning to dynamically adapt and generate domain models, initial states, and goals for complex tasks, achieving strong performance in various environments and with real-world robots.