Agile Continuous Jumping in Discontinuous Terrains
Yuxiang Yang, Guanya Shi, Changyi Lin, Xiangyun Meng, Rosario Scalise, Mateo Guaman Castro, Wenhao Yu, Tingnan Zhang, Ding Zhao, Jie Tan, Byron Boots
2024-09-18
Summary
This paper discusses a new approach to help quadrupedal robots jump continuously and adaptively over uneven surfaces like stairs and stepping stones.
What's the problem?
Robots often struggle with jumping across complex terrains because traditional methods focus on single jumps, which makes it hard to execute dynamic movements over longer distances. Existing techniques can be inefficient and do not effectively handle the variability of different terrains.
What's the solution?
The researchers developed a hierarchical learning and control framework that includes several components: a heightmap predictor for understanding terrain, a motion policy that adapts to different surfaces, and a precise leg controller for tracking movements. This combination allows the robot to perform agile and continuous jumps, enabling it to cross obstacles like two stair steps in one jump. The framework also minimizes the gap between simulation and real-world performance by accurately modeling the robot's hardware.
Why it matters?
This research is important because it enhances the capabilities of robots in navigating complex environments, which can be useful in various applications such as search and rescue operations, delivery services, and exploring uneven terrains. By improving how robots jump and adapt to their surroundings, this work could lead to more advanced robotic systems that can operate effectively in real-world scenarios.
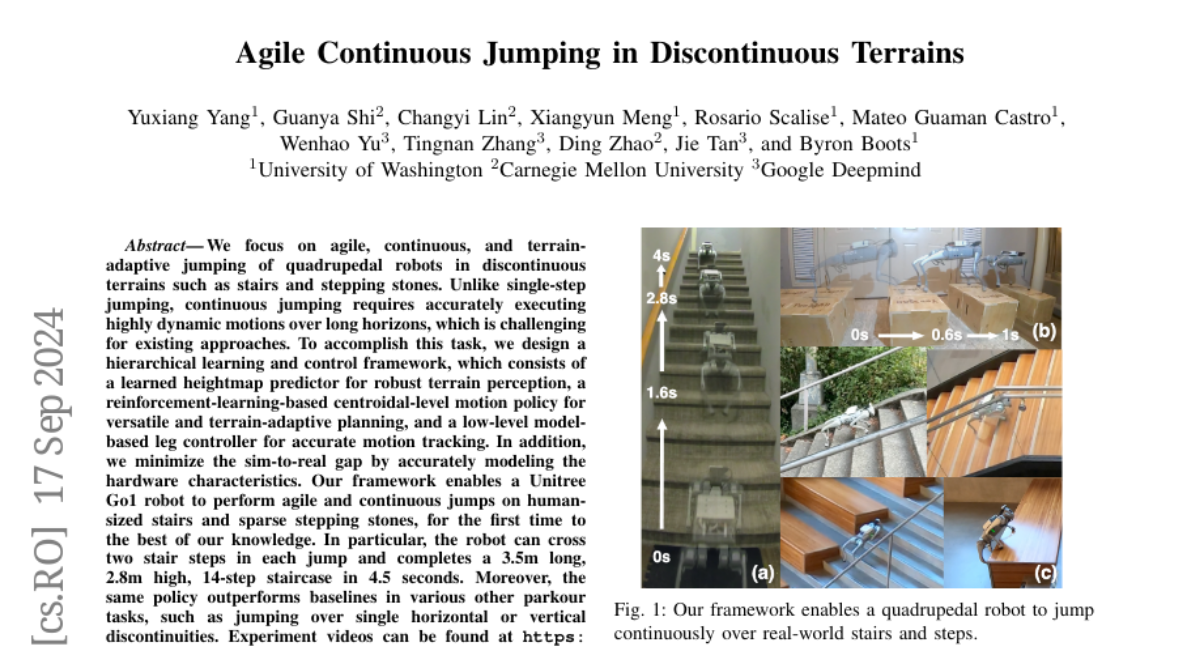
Abstract
We focus on agile, continuous, and terrain-adaptive jumping of quadrupedal robots in discontinuous terrains such as stairs and stepping stones. Unlike single-step jumping, continuous jumping requires accurately executing highly dynamic motions over long horizons, which is challenging for existing approaches. To accomplish this task, we design a hierarchical learning and control framework, which consists of a learned heightmap predictor for robust terrain perception, a reinforcement-learning-based centroidal-level motion policy for versatile and terrain-adaptive planning, and a low-level model-based leg controller for accurate motion tracking. In addition, we minimize the sim-to-real gap by accurately modeling the hardware characteristics. Our framework enables a Unitree Go1 robot to perform agile and continuous jumps on human-sized stairs and sparse stepping stones, for the first time to the best of our knowledge. In particular, the robot can cross two stair steps in each jump and completes a 3.5m long, 2.8m high, 14-step staircase in 4.5 seconds. Moreover, the same policy outperforms baselines in various other parkour tasks, such as jumping over single horizontal or vertical discontinuities. Experiment videos can be found at https://yxyang.github.io/jumping\_cod/.