Consistent Time-of-Flight Depth Denoising via Graph-Informed Geometric Attention
Weida Wang, Changyong He, Jin Zeng, Di Qiu
2025-07-01
Summary
This paper talks about a new method that improves depth images created by Time-of-Flight (ToF) sensors by reducing noise and keeping the image sharp and stable over time.
What's the problem?
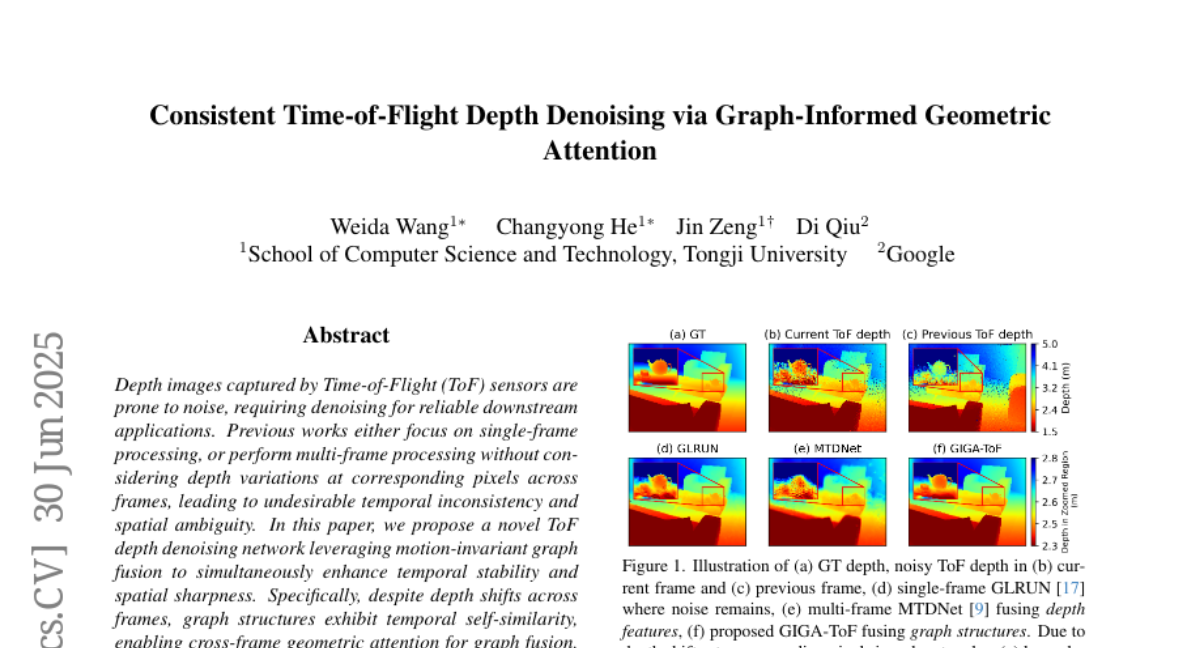
ToF sensors, which measure how far away objects are by timing light, often produce noisy images with errors that make it hard to get clear and steady depth information, especially when objects or the sensor moves.
What's the solution?
The researchers developed a network that uses a special graph structure to fuse information in a way that stays consistent even when things move. This method helps the system keep the depth images sharp and stable by combining both spatial and temporal information carefully.
Why it matters?
This matters because better depth images allow devices like smartphones, robots, and self-driving cars to understand their surroundings more accurately and reliably, improving functions like object detection and navigation.
Abstract
A ToF depth denoising network using motion-invariant graph fusion enhances temporal stability and spatial sharpness, achieving state-of-the-art performance on synthetic and real datasets.