Depth Anything with Any Prior
Zehan Wang, Siyu Chen, Lihe Yang, Jialei Wang, Ziang Zhang, Hengshuang Zhao, Zhou Zhao
2025-05-16
Summary
This paper talks about Prior Depth Anything, a new system that combines two different ways of figuring out how far away things are in a picture, so it can create really accurate and detailed depth maps for any scene.
What's the problem?
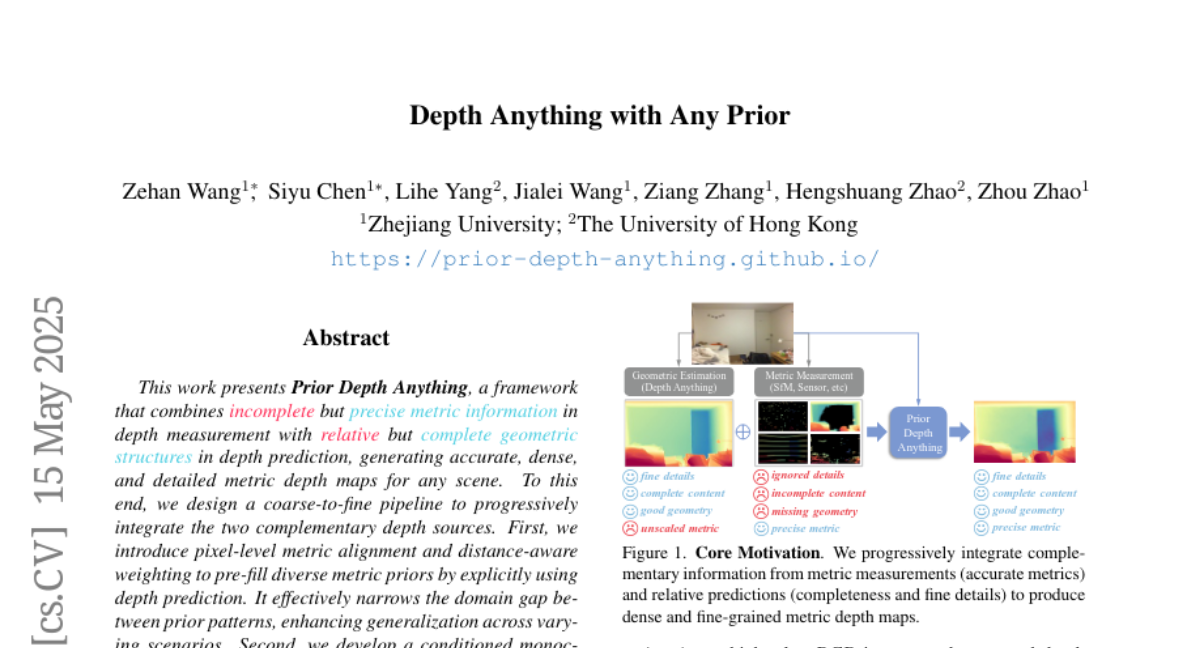
The problem is that current methods for measuring depth in images either give very precise but incomplete information or provide a full picture that's not as accurate, making it hard to get both detail and correctness at the same time.
What's the solution?
The researchers designed a process that first fills in the precise depth measurements wherever possible, then uses another model to predict the missing parts and clean up any errors. By merging these two sources step by step, their system can handle all kinds of depth data and produce high-quality results even in new or challenging situations.
Why it matters?
This matters because having better depth maps helps with things like self-driving cars, robotics, and virtual reality, where understanding the exact shape and distance of everything in a scene is super important for safety and realism.
Abstract
Prior Depth Anything framework integrates metric depth measurement and geometric depth prediction into a coarse-to-fine pipeline for accurate, dense, and detailed depth maps, demonstrating superior zero-shot performance across multiple tasks.