GLEAM: Learning Generalizable Exploration Policy for Active Mapping in Complex 3D Indoor Scenes
Xiao Chen, Tai Wang, Quanyi Li, Tao Huang, Jiangmiao Pang, Tianfan Xue
2025-05-27
Summary
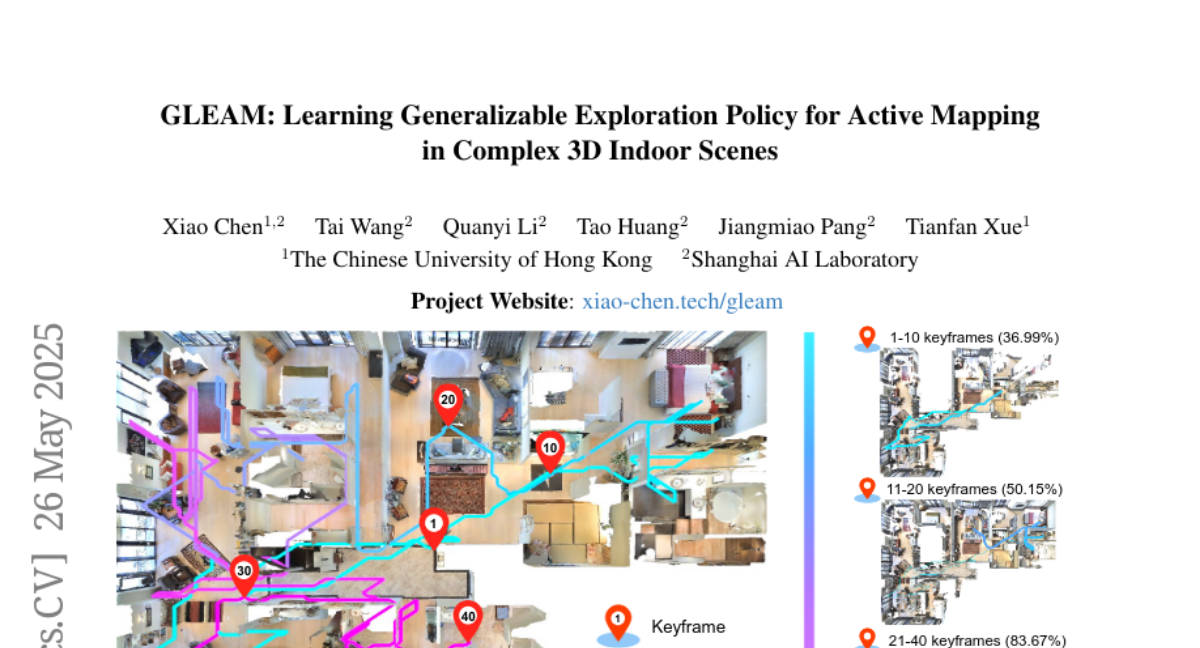
This paper talks about GLEAM, a new way for AI to explore and map out complicated 3D indoor spaces, like buildings, in a smarter and more reliable way. It also introduces GLEAM-Bench, a special test to measure how well these exploration strategies work.
What's the problem?
The problem is that current AI systems often have trouble exploring and creating accurate maps of complex indoor environments, especially when they need to work in new places they've never seen before. This makes it hard for robots or virtual agents to move around safely and efficiently in real-world buildings.
What's the solution?
The authors developed GLEAM, an exploration policy that helps AI understand and map environments better by using semantic representations, which means the AI can recognize and use information about different objects and spaces. They also created GLEAM-Bench, a benchmark to test and compare how well different strategies perform in these challenging settings.
Why it matters?
This is important because it helps robots and AI agents become more useful in real-life situations, like search and rescue, cleaning, or delivering items, since they can now explore and understand new indoor environments more effectively and safely.
Abstract
A new benchmark and policy, GLEAM-Bench and GLEAM, improve the scalability and reliability of active mapping in complex environments through semantic representations and efficient exploration strategies.