Is Diversity All You Need for Scalable Robotic Manipulation?
Modi Shi, Li Chen, Jin Chen, Yuxiang Lu, Chiming Liu, Guanghui Ren, Ping Luo, Di Huang, Maoqing Yao, Hongyang Li
2025-07-09
Summary
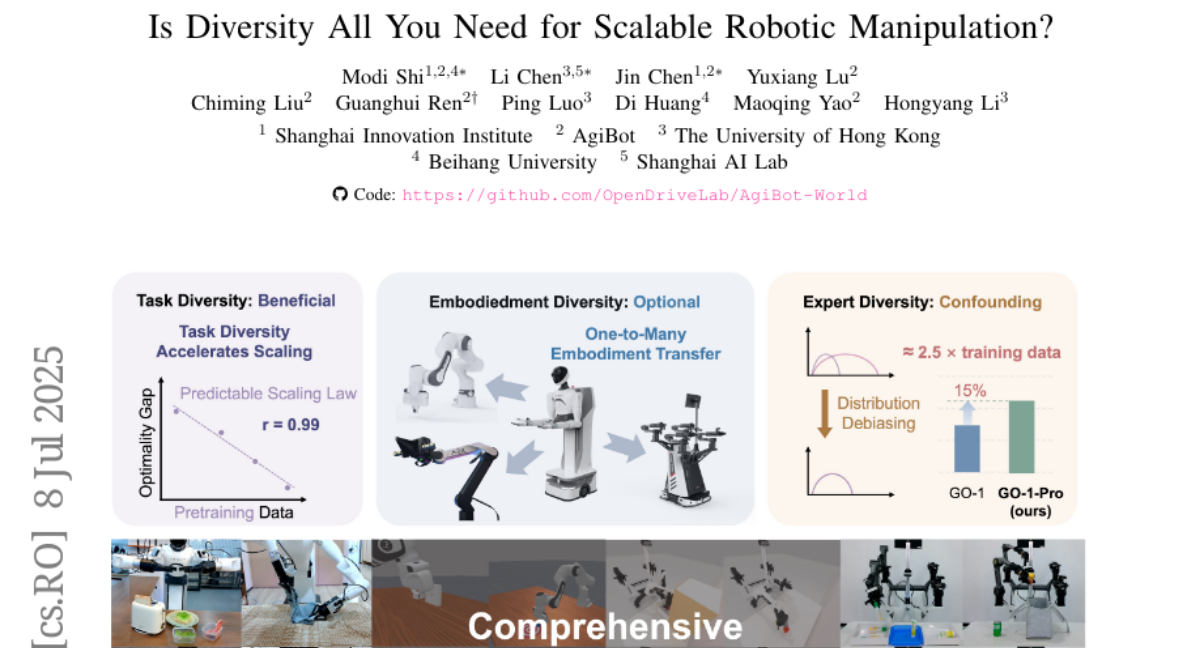
This paper talks about how having a wide variety of different tasks is more important for training robots to manipulate objects than just having lots of examples of the same task. It also finds that training with data from one type of robot can work well when applied to other robot types, and that having too many different ways experts perform tasks can confuse the robot.
What's the problem?
The problem is that it’s unclear how to best collect and use data for teaching robots to do many kinds of tasks. People used to think having the most diverse data was always best, but that hasn’t been proven for robots. Plus, robots often struggle to learn from many human experts whose styles might differ a lot.
What's the solution?
The researchers ran experiments showing that training on many different tasks helps robots learn better and transfer their skills to new tasks. They showed it’s not always necessary to have many robot types in training, and they introduced a method to reduce confusion caused by experts’ different ways of moving, which improved performance.
Why it matters?
This matters because it helps scientists understand the best ways to teach robots using data, making it possible to create robots that can learn many skills more efficiently and work well across different types of robots and situations.
Abstract
Investigation into data diversity in robotic manipulation reveals that task diversity is more critical than demonstration quantity, single-embodiment data can suffice for cross-embodiment transfer, and expert diversity can be confounding, leading to a distribution debiasing method that improves performance.