Learning to Manipulate Anywhere: A Visual Generalizable Framework For Reinforcement Learning
Zhecheng Yuan, Tianming Wei, Shuiqi Cheng, Gu Zhang, Yuanpei Chen, Huazhe Xu
2024-07-25
Summary
This paper introduces Maniwhere, a new framework designed to help robots learn how to manipulate objects in various environments. It focuses on enabling robots to generalize their skills across different visual scenarios and tasks, making them more adaptable and effective.
What's the problem?
Many robots struggle to perform well in different settings because they are often trained in controlled environments that do not reflect real-world complexity. This means that when they encounter new situations or visual disturbances, they may not know how to react properly. Additionally, existing methods for training these robots often do not consider how to effectively learn from multiple viewpoints, which is crucial for understanding spatial relationships.
What's the solution?
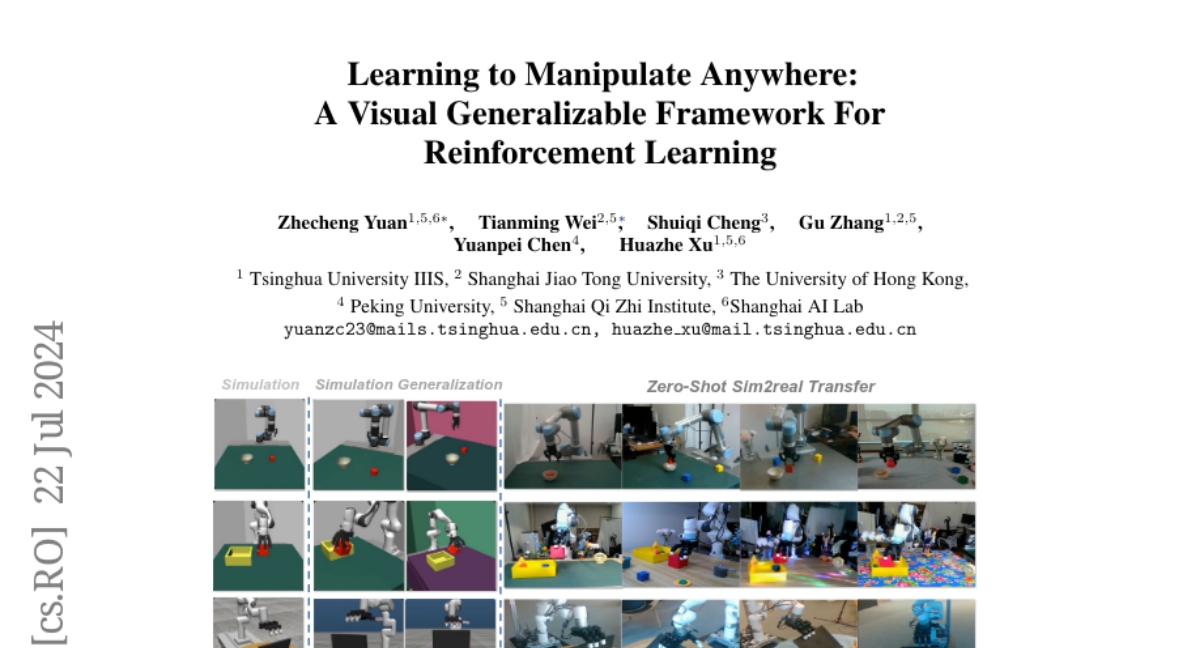
Maniwhere addresses these issues by using a multi-view representation learning approach combined with a Spatial Transformer Network (STN). This allows the robot to capture important information from various angles and adapt its actions accordingly. The framework also employs a curriculum-based randomization and augmentation strategy during training, which helps stabilize the learning process and improves the robot's ability to generalize its skills. The researchers tested Maniwhere on eight different manipulation tasks across three types of robotic hardware, demonstrating its effectiveness in both simulated and real-world scenarios.
Why it matters?
This research is important because it enhances the capabilities of robots, allowing them to perform tasks in diverse environments without needing extensive retraining. By improving how robots learn to manipulate objects visually, Maniwhere can lead to better performance in applications such as manufacturing, healthcare, and service industries, ultimately making robots more useful in everyday life.
Abstract
Can we endow visuomotor robots with generalization capabilities to operate in diverse open-world scenarios? In this paper, we propose Maniwhere, a generalizable framework tailored for visual reinforcement learning, enabling the trained robot policies to generalize across a combination of multiple visual disturbance types. Specifically, we introduce a multi-view representation learning approach fused with Spatial Transformer Network (STN) module to capture shared semantic information and correspondences among different viewpoints. In addition, we employ a curriculum-based randomization and augmentation approach to stabilize the RL training process and strengthen the visual generalization ability. To exhibit the effectiveness of Maniwhere, we meticulously design 8 tasks encompassing articulate objects, bi-manual, and dexterous hand manipulation tasks, demonstrating Maniwhere's strong visual generalization and sim2real transfer abilities across 3 hardware platforms. Our experiments show that Maniwhere significantly outperforms existing state-of-the-art methods. Videos are provided at https://gemcollector.github.io/maniwhere/.