ManipTrans: Efficient Dexterous Bimanual Manipulation Transfer via Residual Learning
Kailin Li, Puhao Li, Tengyu Liu, Yuyang Li, Siyuan Huang
2025-04-02
Summary
This paper is about teaching robots to use their hands like humans, especially when using both hands together.
What's the problem?
It's hard to get robots to perform complex tasks with their hands, like humans do, because it's difficult to create realistic training scenarios.
What's the solution?
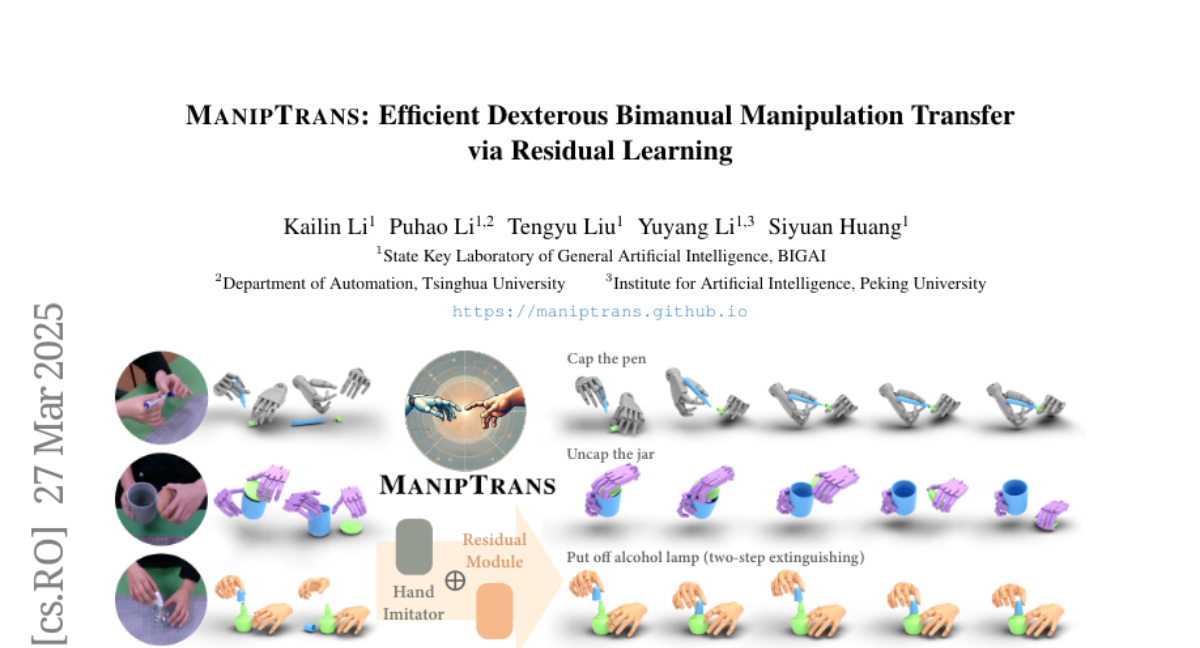
The researchers developed a system that first teaches the robot to copy human hand movements and then fine-tunes it to handle specific tasks, making it more efficient and accurate.
Why it matters?
This work matters because it can lead to robots that can perform more complex and useful tasks in the real world, like assembling products or assisting in surgery.
Abstract
Human hands play a central role in interacting, motivating increasing research in dexterous robotic manipulation. Data-driven embodied AI algorithms demand precise, large-scale, human-like manipulation sequences, which are challenging to obtain with conventional reinforcement learning or real-world teleoperation. To address this, we introduce ManipTrans, a novel two-stage method for efficiently transferring human bimanual skills to dexterous robotic hands in simulation. ManipTrans first pre-trains a generalist trajectory imitator to mimic hand motion, then fine-tunes a specific residual module under interaction constraints, enabling efficient learning and accurate execution of complex bimanual tasks. Experiments show that ManipTrans surpasses state-of-the-art methods in success rate, fidelity, and efficiency. Leveraging ManipTrans, we transfer multiple hand-object datasets to robotic hands, creating DexManipNet, a large-scale dataset featuring previously unexplored tasks like pen capping and bottle unscrewing. DexManipNet comprises 3.3K episodes of robotic manipulation and is easily extensible, facilitating further policy training for dexterous hands and enabling real-world deployments.