NeuFlow v2: High-Efficiency Optical Flow Estimation on Edge Devices
Zhiyong Zhang, Aniket Gupta, Huaizu Jiang, Hanumant Singh
2024-08-20
Summary
This paper introduces NeuFlow v2, a new method for estimating optical flow quickly and efficiently on edge devices, such as smartphones or small computers.
What's the problem?
Estimating optical flow, which is the movement of objects in a video, is important for many applications like video analysis and autonomous driving. However, existing methods often require a lot of computing power and time, making them unsuitable for devices with limited resources.
What's the solution?
NeuFlow v2 improves upon its predecessor by introducing a lighter backbone and a fast refinement module. These updates allow the model to process data more efficiently while still providing high accuracy. NeuFlow v2 can run at over 20 frames per second on images with a resolution of 512x384, achieving a speedup of 10 to 70 times compared to other leading methods.
Why it matters?
This research is significant because it enables real-time optical flow estimation on devices that typically have less computational power. This advancement can enhance various technologies, including robotics, augmented reality, and video surveillance, making them more effective and accessible.
Abstract
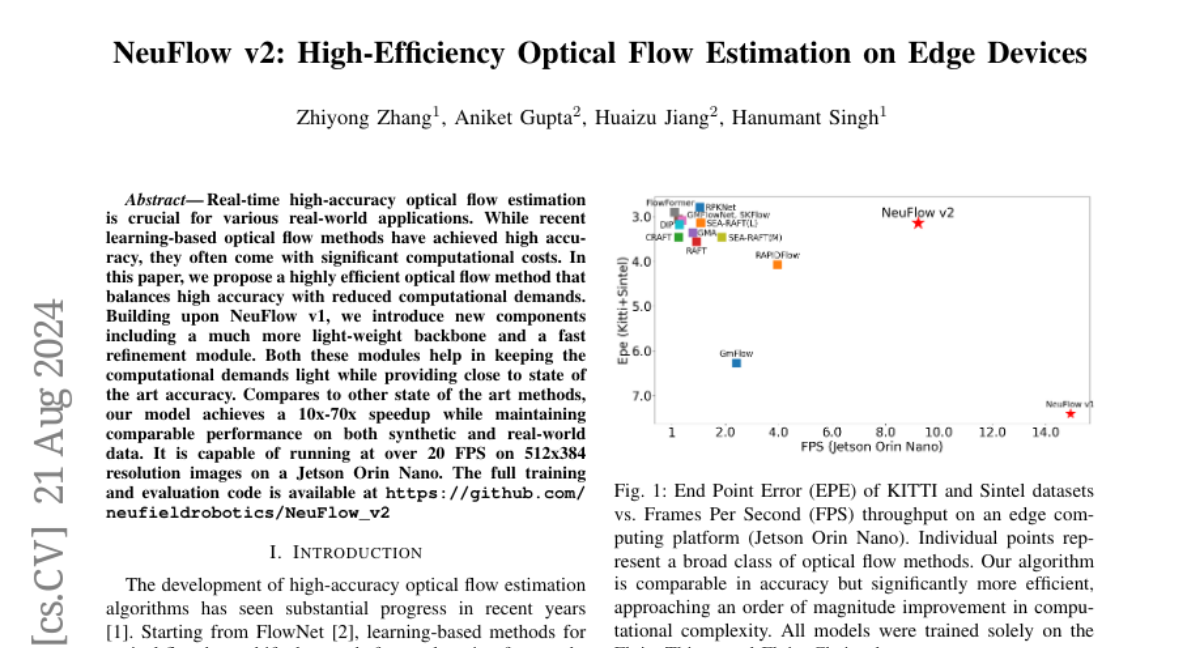
Real-time high-accuracy optical flow estimation is crucial for various real-world applications. While recent learning-based optical flow methods have achieved high accuracy, they often come with significant computational costs. In this paper, we propose a highly efficient optical flow method that balances high accuracy with reduced computational demands. Building upon NeuFlow v1, we introduce new components including a much more light-weight backbone and a fast refinement module. Both these modules help in keeping the computational demands light while providing close to state of the art accuracy. Compares to other state of the art methods, our model achieves a 10x-70x speedup while maintaining comparable performance on both synthetic and real-world data. It is capable of running at over 20 FPS on 512x384 resolution images on a Jetson Orin Nano. The full training and evaluation code is available at https://github.com/neufieldrobotics/NeuFlow_v2.