PRIX: Learning to Plan from Raw Pixels for End-to-End Autonomous Driving
Maciej K. Wozniak, Lianhang Liu, Yixi Cai, Patric Jensfelt
2025-07-28
Summary
This paper talks about PRIX, a new model for self-driving cars that drives the vehicle using only cameras and no other sensors, achieving top results using a special transformer to understand the driving environment.
What's the problem?
Most autonomous driving models use lots of sensors like lidar and radar which can be expensive and complex, and some models that only use cameras struggle to be both fast and accurate.
What's the solution?
The researchers designed PRIX with a Context-aware Recalibration Transformer that processes camera images efficiently and adjusts its understanding based on the situation, allowing it to plan driving actions end-to-end quickly and accurately.
Why it matters?
This matters because PRIX lowers the cost and complexity of self-driving cars by relying only on cameras while still performing very well, making autonomous driving technology more accessible and practical.
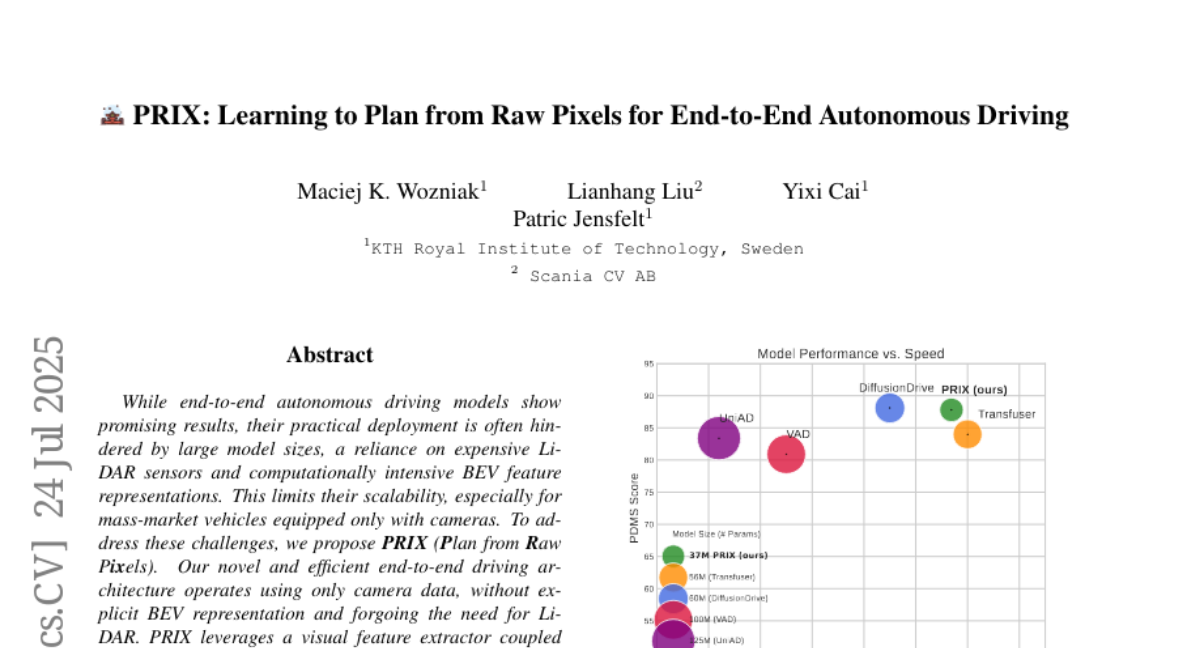
Abstract
PRIX, an efficient end-to-end driving model using only camera data, achieves state-of-the-art performance with a Context-aware Recalibration Transformer, outperforming larger multimodal planners in terms of speed and size.