Real-is-Sim: Bridging the Sim-to-Real Gap with a Dynamic Digital Twin for Real-World Robot Policy Evaluation
Jad Abou-Chakra, Lingfeng Sun, Krishan Rana, Brandon May, Karl Schmeckpeper, Maria Vittoria Minniti, Laura Herlant
2025-04-07
Summary
This paper talks about Real-is-Sim, a system that uses a constantly updating virtual copy of the real world to train and test robots, so they work better in actual physical environments.
What's the problem?
Testing robot skills in the real world is slow and expensive, and current simulations don’t match reality well enough to predict how robots will perform.
What's the solution?
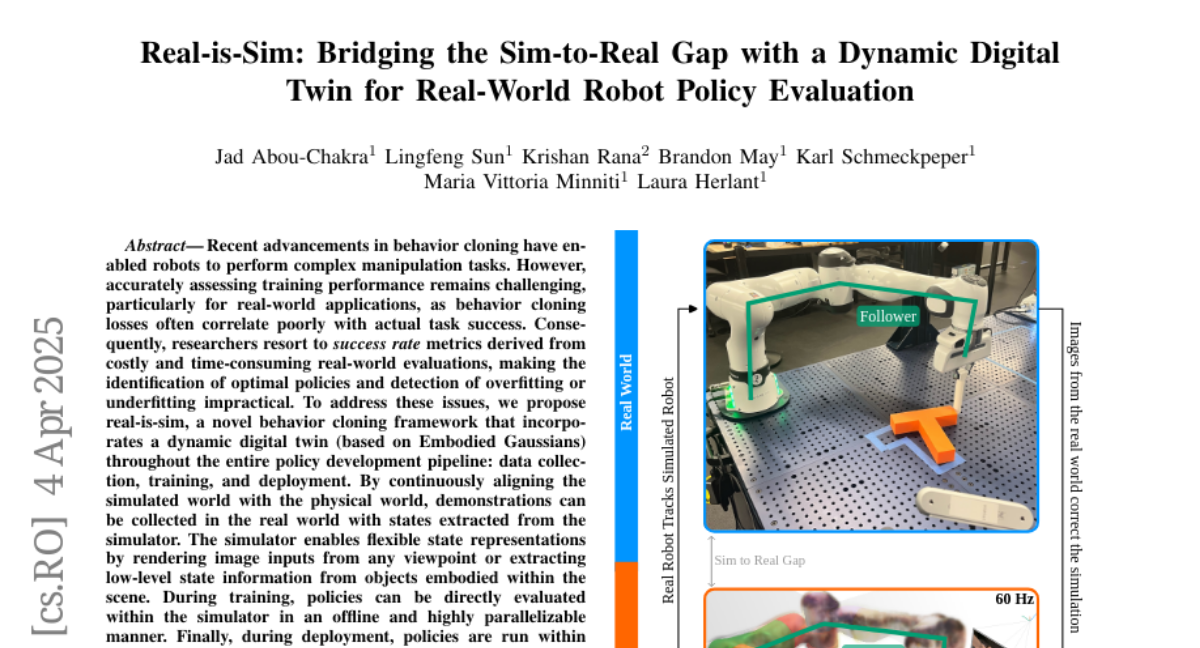
Real-is-Sim creates a live digital twin of the real world that syncs with cameras, letting robots train in simulations that stay identical to reality, and allows testing in virtual setups that match real-world results.
Why it matters?
This helps create robots that learn faster and work more reliably in real-life tasks like moving objects, without needing endless real-world trials.
Abstract
Recent advancements in behavior cloning have enabled robots to perform complex manipulation tasks. However, accurately assessing training performance remains challenging, particularly for real-world applications, as behavior cloning losses often correlate poorly with actual task success. Consequently, researchers resort to success rate metrics derived from costly and time-consuming real-world evaluations, making the identification of optimal policies and detection of overfitting or underfitting impractical. To address these issues, we propose real-is-sim, a novel behavior cloning framework that incorporates a dynamic digital twin (based on Embodied Gaussians) throughout the entire policy development pipeline: data collection, training, and deployment. By continuously aligning the simulated world with the physical world, demonstrations can be collected in the real world with states extracted from the simulator. The simulator enables flexible state representations by rendering image inputs from any viewpoint or extracting low-level state information from objects embodied within the scene. During training, policies can be directly evaluated within the simulator in an offline and highly parallelizable manner. Finally, during deployment, policies are run within the simulator where the real robot directly tracks the simulated robot's joints, effectively decoupling policy execution from real hardware and mitigating traditional domain-transfer challenges. We validate real-is-sim on the PushT manipulation task, demonstrating strong correlation between success rates obtained in the simulator and real-world evaluations. Videos of our system can be found at https://realissim.rai-inst.com.