RoCo-Sim: Enhancing Roadside Collaborative Perception through Foreground Simulation
Yuwen Du, Anning Hu, Zichen Chao, Yifan Lu, Junhao Ge, Genjia Liu, Weitao Wu, Lanjun Wang, Siheng Chen
2025-03-19
Summary
This paper talks about improving how cars can 'see' their surroundings by using cameras placed on the side of the road and sharing information between them.
What's the problem?
Roadside cameras can have problems like being out of sync, missing information, or not agreeing with each other, which makes it hard for cars to understand what's happening around them.
What's the solution?
The researchers created a computer simulation called RoCo-Sim that can generate realistic data for roadside cameras, which helps to fix these problems.
Why it matters?
This work matters because it can help cars become more aware of their surroundings and improve safety on the road.
Abstract
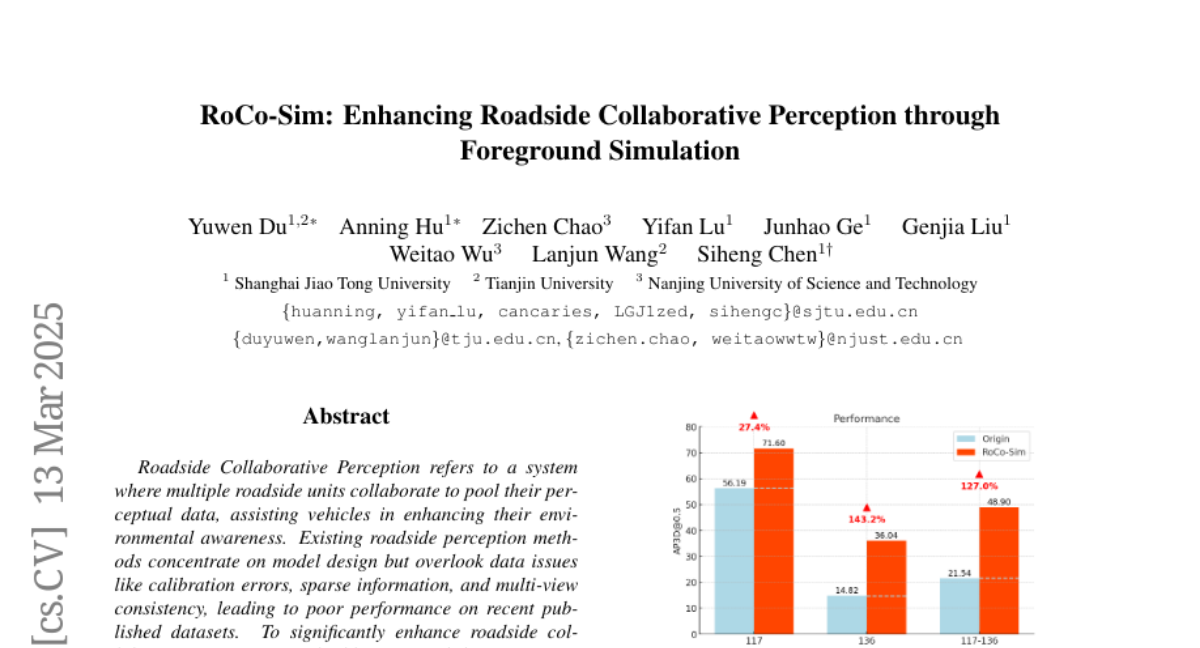
Roadside Collaborative Perception refers to a system where multiple roadside units collaborate to pool their perceptual data, assisting vehicles in enhancing their environmental awareness. Existing roadside perception methods concentrate on model design but overlook data issues like calibration errors, sparse information, and multi-view consistency, leading to poor performance on recent published datasets. To significantly enhance roadside collaborative perception and address critical data issues, we present the first simulation framework RoCo-Sim for road-side collaborative perception. RoCo-Sim is capable of generating diverse, multi-view consistent simulated roadside data through dynamic foreground editing and full-scene style transfer of a single image. RoCo-Sim consists of four components: (1) Camera Extrinsic Optimization ensures accurate 3D to 2D projection for roadside cameras; (2) A novel Multi-View Occlusion-Aware Sampler (MOAS) determines the placement of diverse digital assets within 3D space; (3) DepthSAM innovatively models foreground-background relationships from single-frame fixed-view images, ensuring multi-view consistency of foreground; and (4) Scalable Post-Processing Toolkit generates more realistic and enriched scenes through style transfer and other enhancements. RoCo-Sim significantly improves roadside 3D object detection, outperforming SOTA methods by 83.74 on Rcooper-Intersection and 83.12 on TUMTraf-V2X for AP70. RoCo-Sim fills a critical gap in roadside perception simulation. Code and pre-trained models will be released soon: https://github.com/duyuwen-duen/RoCo-Sim