ScanBot: Towards Intelligent Surface Scanning in Embodied Robotic Systems
Zhiling Chen, Yang Zhang, Fardin Jalil Piran, Qianyu Zhou, Jiong Tang, Farhad Imani
2025-05-26
Summary
This paper talks about ScanBot, a new dataset and challenge that helps robots learn how to scan surfaces really accurately by following instructions, combining vision and language skills.
What's the problem?
The problem is that it's tough for robots to scan surfaces precisely in the real world, especially when they have to understand and follow instructions using both what they see and what they read or hear. Current AI models struggle to create smooth and accurate scanning paths when faced with real-world obstacles and complicated instructions.
What's the solution?
The researchers built the ScanBot dataset, which gives robots lots of practice tasks where they have to scan surfaces based on specific instructions. This helps test and improve AI models that combine vision and language so they can handle these scanning challenges better.
Why it matters?
This is important because it pushes the development of smarter robots that can be used in areas like cleaning, inspection, or healthcare, where precise scanning and following instructions are crucial for doing a good job.
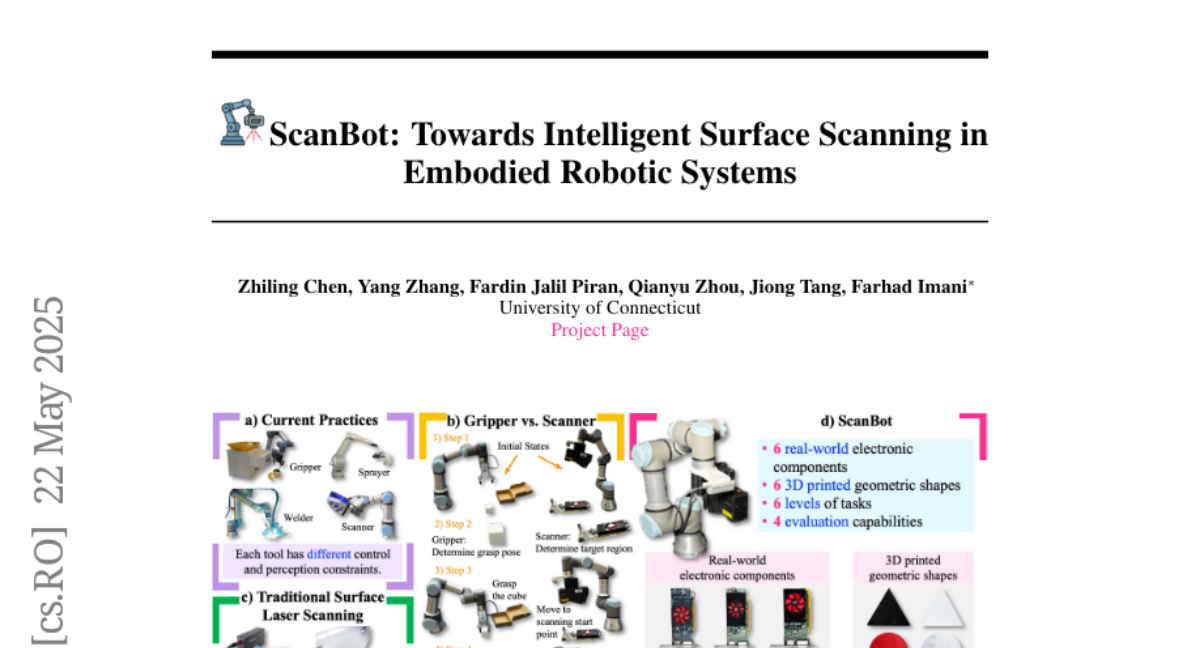
Abstract
The ScanBot dataset, focusing on instruction-conditioned high-precision robotic surface scanning, showcases challenges for vision-language action models in achieving precise scanning trajectories under real-world constraints.