SkillBlender: Towards Versatile Humanoid Whole-Body Loco-Manipulation via Skill Blending
Yuxuan Kuang, Haoran Geng, Amine Elhafsi, Tan-Dzung Do, Pieter Abbeel, Jitendra Malik, Marco Pavone, Yue Wang
2025-06-16
Summary
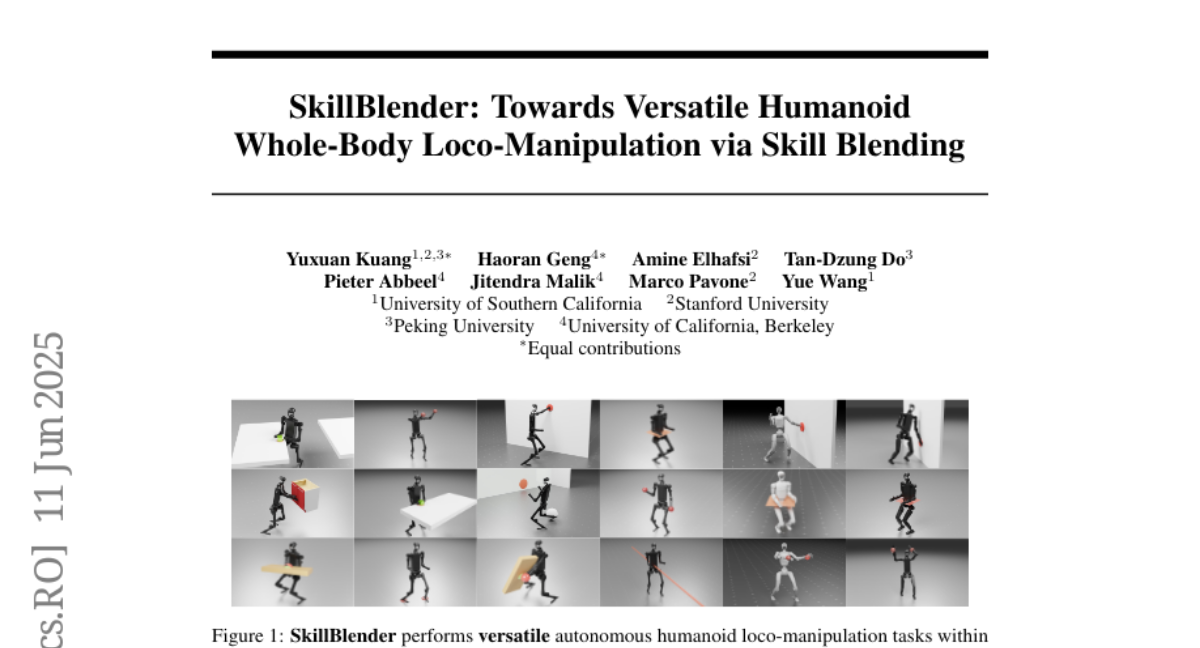
This paper talks about SkillBlender, a new method that helps humanoid robots perform a wide variety of whole-body movement and manipulation tasks efficiently. It uses a special approach called hierarchical reinforcement learning, where the robot first learns simple, basic skills like walking or reaching, and then blends these skills together to do more complex tasks.
What's the problem?
The problem is that existing methods for controlling humanoid robots often require a lot of fine-tuning for each specific task, which takes a lot of time and effort. This makes it hard to create robots that can easily adapt to different tasks in everyday environments because each new task needs separate detailed adjustments.
What's the solution?
The solution is SkillBlender's two-step approach: first, it pretrains basic, reusable skills that are not tied to any single task. Then, it uses a high-level controller to combine or blend these pretrained skills dynamically to solve different complex loco-manipulation tasks. This method requires very little task-specific tuning and encourages more natural, feasible movements by focusing on blending multiple skills at once.
Why it matters?
This matters because it can make humanoid robots much more versatile and practical in daily life, able to perform a wide range of tasks without needing extensive retraining for each one. By blending pretrained skills, SkillBlender improves both the accuracy and naturalness of robot movements, helping robots work better in real-world environments and bringing us closer to useful, adaptable humanoid robots.
Abstract
SkillBlender is a hierarchical reinforcement learning framework that uses pretrained primitive skills to efficiently solve diverse loco-manipulation tasks for humanoid robots.