VIKI-R: Coordinating Embodied Multi-Agent Cooperation via Reinforcement Learning
Li Kang, Xiufeng Song, Heng Zhou, Yiran Qin, Jie Yang, Xiaohong Liu, Philip Torr, Lei Bai, Zhenfei Yin
2025-06-23
Summary
This paper talks about VIKI-R, a system that uses reinforcement learning to help different robots or AI agents work together by understanding visual information and cooperating in complex tasks.
What's the problem?
The problem is that coordinating multiple robots or AI agents in changing environments is really hard because they need to see, understand, and plan their actions together efficiently.
What's the solution?
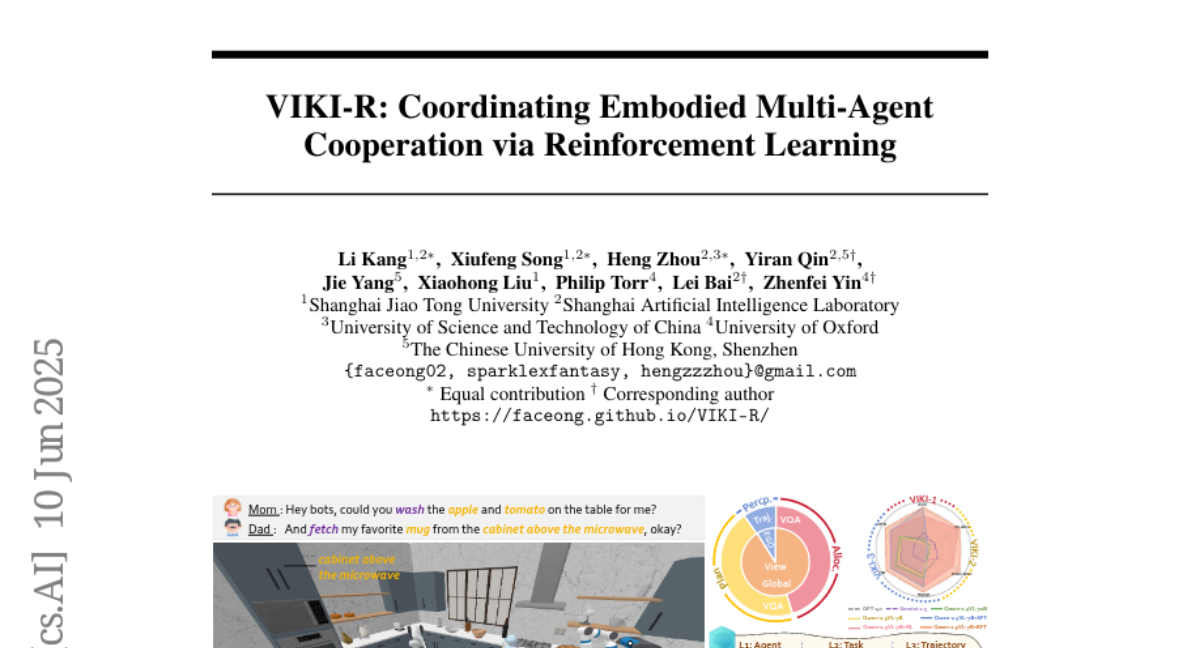
The researchers created VIKI-Bench, a testing environment with many levels that measure how well agents cooperate using visual and language understanding. They then built VIKI-R, which fine-tunes vision-language models with step-by-step reasoning examples and reinforcement learning that rewards good cooperation. This helps agents learn to work together better in tasks like activating, planning, and moving through spaces.
Why it matters?
This matters because better cooperation among AI agents can improve how robots perform tasks in the real world, like working in teams for search and rescue or assembling things, making them more useful and effective.
Abstract
VIKI-Bench and VIKI-R provide a benchmark and framework for evaluating and improving visual-driven cooperation among diverse embodied agents using vision-language models and reinforcement learning.